北京龙软科技股份有限公司于近日收到美国专利商标局颁发的发明专利证书,龙软科技与中国船舶重工集团公司第七0七研究所共同申请的“一种综采工作面测量机器人装置和自动测量系统”获得美国发明专利授权,具体情况如下:
发明名称:MEASURING-ROBOT DEVICE FOR FULLY MECHANIZED COAL MINING FACE AND AUTOMATIC MEASURING SYSTEM
专利号:US 11,435,183 B2
专利申请日:2021年12月31日
专利公告日:2022年9月6日
专利权人:北京龙软科技股份有限公司;中国船舶重工集团公司第七0七研究所
发明人:毛善君 张新远 李鑫超 邰洋 陈华州 刘嘉倬
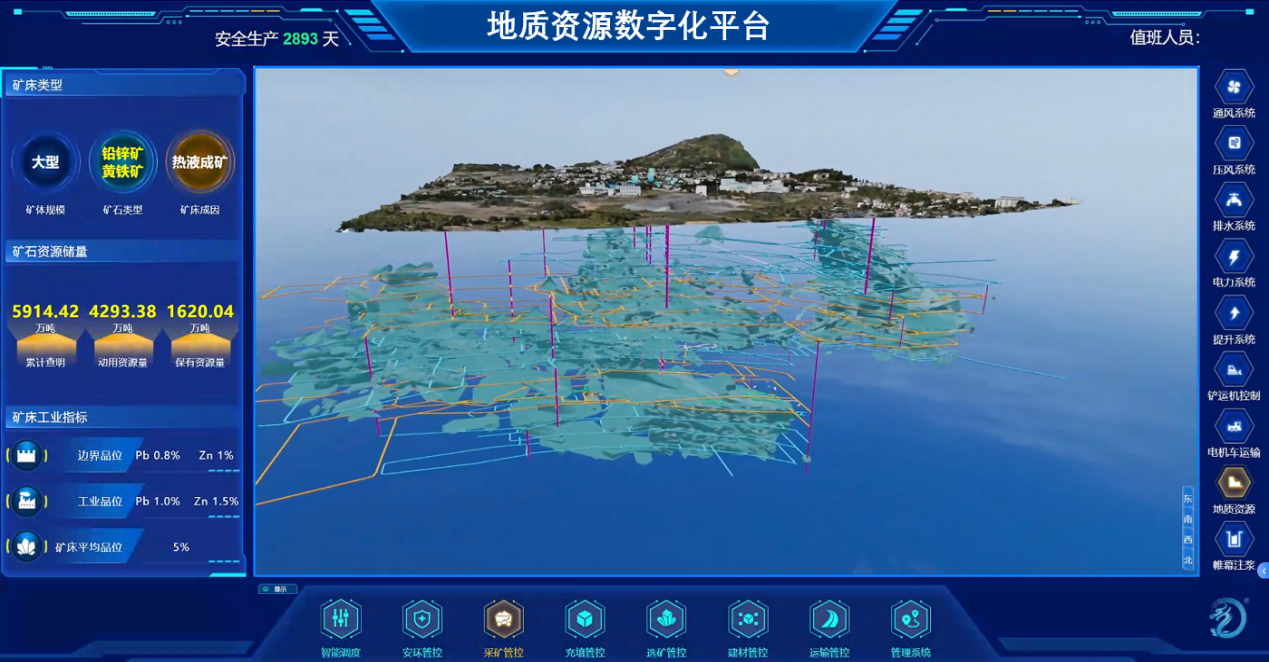
测量机器人是一种集自动整平、定向、目标识别、照准、测角测距、目标跟踪、计算、存储于一体的无人值守的全自动测量平台。主控测量机器人通过风机两巷的控制点棱镜,将大地坐标引入综采工作面内。多个测量机器人协同构成整个综采工作面测控网络自动测量系统(如图1所示),可以实现综采工作面内固定和移动目标点的大地坐标测量。
综采工作面测控网络自动测量系统代替传统的综采工作面的人工导线测量任务,实现随着工作面的动态推进,在无人值守情况下实时全自动测量工作面固定和移动目标点的(x,y,z)三维大地坐标,为智能化综采工作面装备提供精准位置服务。
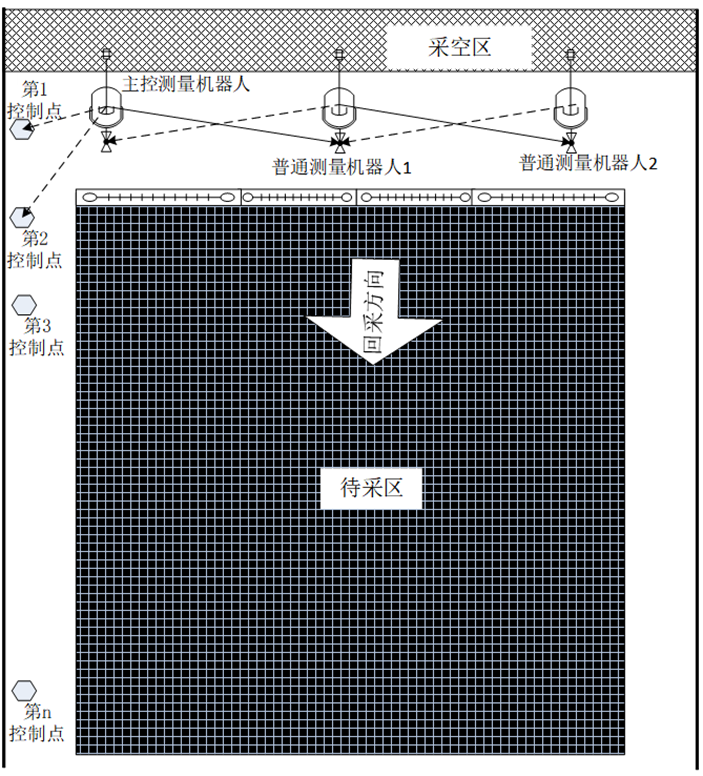
图1 综采工作面测控网络自动测量系统
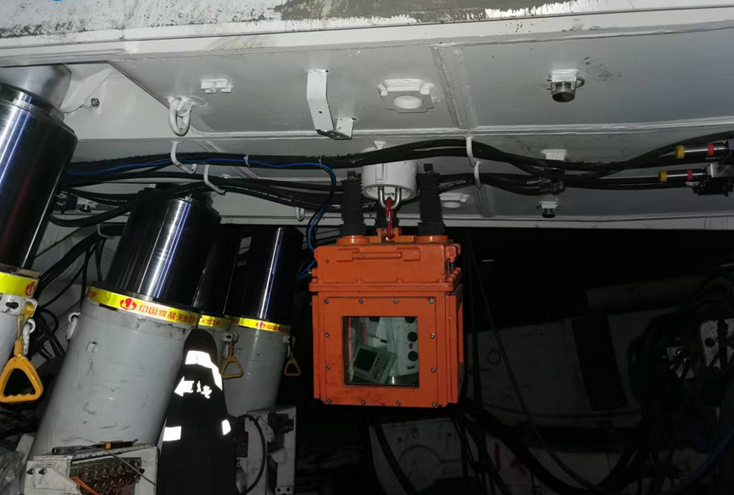
图2 金凤煤矿井下测量机器人
综采工作面测量机器人装置和自动测量系统已成功应用在国家能源集团金凤煤矿(图2所示)等矿井。结合基于大地坐标的综采工作面高精度地质模型,通过惯导和测量机器人自动测量系统实时测量采煤机的三维大地坐标,实现综采工作面高精度地质模型与采煤机空间关系的动态耦合,为新一代综采工作面智能化采煤“自适应截割”提供高技术支撑。
该发明专利为公司自主研发,2021年5月25日,已经获得我国发明专利授权(专利号:ZL202110032953.6),目前已用于公司产品中,是公司核心技术的体现和延伸。本次发明专利的取得有利于公司产品在美国市场受到有效的知识产权保护,有利于进一步完善公司知识产权保护体系,发挥公司自主知识产权技术优势,促进技术创新,从而提升公司核心竞争力。
基于测量机器人的新一代综采工作面自适应割煤系统是龙软科技在世界上独创的智能化采煤方法,也通过10多项发明专利进行了知识产权的系统保护。我们相信,这将使综采工作面最终的少人或无人高效自适应开采成为现实。
CopyRight©北京龙软科技股份有限公司 版权所有 京ICP备05015939号 京公网安备 11010802011445号




 返回列表
返回列表
